Conception d’une Matrice HF 6 voies
Matrice HF DIY dans un shack radioamateur

▶ Une matrice HF ?
Dans un shack radioamateur bien équipé, une matrice HF joue un rôle essentiel dans la gestion efficace des connexions entre les différents équipements. Elle permet de commuter facilement plusieurs antennes sur plusieurs émetteurs-récepteurs, sans avoir à manipuler physiquement les câbles à chaque changement.
Cela offre non seulement un gain de temps appréciable, mais surtout une sécurité accrue pour les équipements, en évitant les erreurs de branchement. Une matrice permet également d’automatiser certains scénarios d’exploitation, comme le basculement rapide entre les bandes ou les modes de trafic.
Elle devient vite indispensable dès que le shack comprend plusieurs antennes directionnelles ou spécialisées.
De plus, en facilitant les comparaisons d’antennes, elle aide à optimiser les performances globales de la station. Enfin, certaines matrices HF peuvent être contrôlées à distance, ce qui est un atout majeur pour les stations pilotées à distance.
Phase d’étude
Choix des matériels











Phase de réalisation

A) Phase d’essais et de mesures
Il y a des donc des pins du Pi Pico dédiées :
– A l’affichage ILI9341
– La commutation de relais
– Le buzzer
– la liaison série via l’uart0
– …
Un schéma électronique vaut mieux que milles discours
B) Schéma
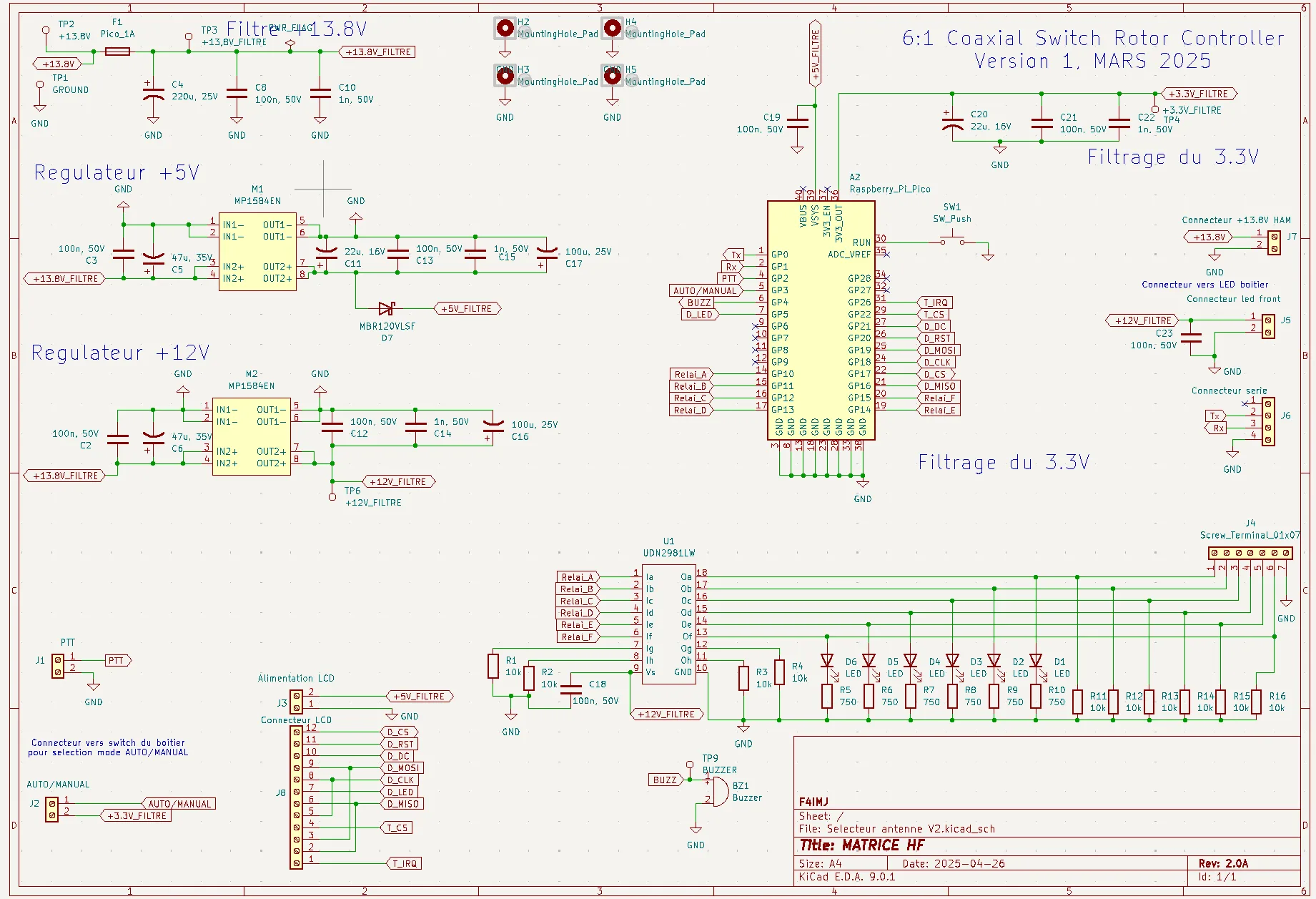
On va parler du schéma réalisé avec KICAD :

a) Le composant UDN2981LW est un composant permettant l’adaptation de niveau 3.3V vers 12V pour alimenter les relais, ce composant au format SOP accepte un Vs de 5V à +50V , le Vin est de 2.4V à 15V parfait pour les 3.3V du Pi Pico, Le output current est de 500mA, ici les relais consomme 35mA ce qui est largement suffisant, attention en sortie on retrouve Vout = Vs−Vce(sat) mais etant donné que la tension Vs est produite par le MP1584EN on pourra ajuster sa valeur en sortie pour que Vout de l’UDN2981LW soit proche de 12V (rien d’alarmant les relais commuteront bien avant 12V).
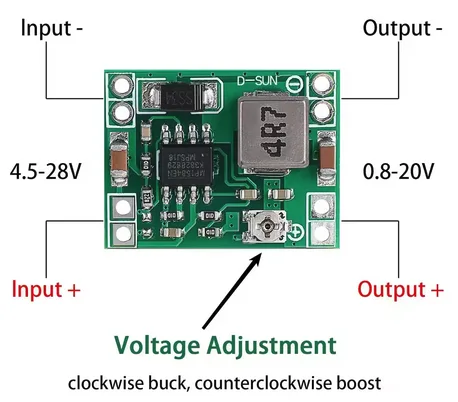
b) Le MP1584EN est un régulateur abaisseur (buck) Haute Fréquence de Monolithic Power Systems, fréquemment proposé en kit (module DC‑DC) sur des plateformes comme AliExpress. Voici les points essentiels :
- Spécifications principales : entrée de 4,5 à 28 V, sortie réglable de 0,8 à 20 V, courant de sortie jusqu’à 3 A, fréquence de commutation programmable jusqu’à 1,5 MHz
- Haute efficacité : le dispositif autorégule sa fréquence en fonction de la charge (mode “pulse skipping”), ce qui réduit les pertes en régime léger et atteint jusqu’à ≈ 95 % d’efficacité lors de tests à 5 V/2 A .
- Conception intelligente : intégration d’un MOSFET haute tension côté haut, soft‑start, limite de courant interne, shutdown thermique, et quiescent current très faible (~100 µA), adapté aux alimentations sur batterie.
- Utilisation pratique courante : livré monté sur une petite carte (~22 × 17 mm),
- Applications typiques : idéal pour alimenter des Raspberry Pi, Arduino, modules LED, buggies, imprimantes, systèmes embarqués, ou tout projet nécessitant un abaissement fréquent de tension entre 4,5 et 28 V à une tension plus basse, avec un bon rendement et un encombrement minimal
En somme, le MP1584EN en kit est un choix que j’apprécie car le rendement est bien meilleur que les régulateurs linéaires (chauffe, dissipation), la tension Vs peut être réglé en fonction de la charge et donc compenser le drop de tension
Les inconvénients sont la sensibilité du potentiomètre, la tension de sortie sera toujours inférieur de 1V par rapport à Vin et c’est une alimentation à découpage, il faut donc filtrer un peu.
Ici dans notre cas la tension d’entrée sera 13.8V (tension de l’alimentation du shack radio) vers une tension 5V et 12V, D’où l’utilisation de deux MP1584EN.
C) Réalisation du code C du Raspberry Pi Pico
Sur le Raspberry Pi Pico il y a deux cœurs donc un void loop() et un void loop1(), l’avantage d’avoir deux cœurs CPU et de pouvoir attribuer du code dans un cœur et un autre bout de code dans un autre cœur.
Le cœur 2 par exemple est dédié au dialogue avec le logiciel « OmniRig frequency reader » presenté plus bas
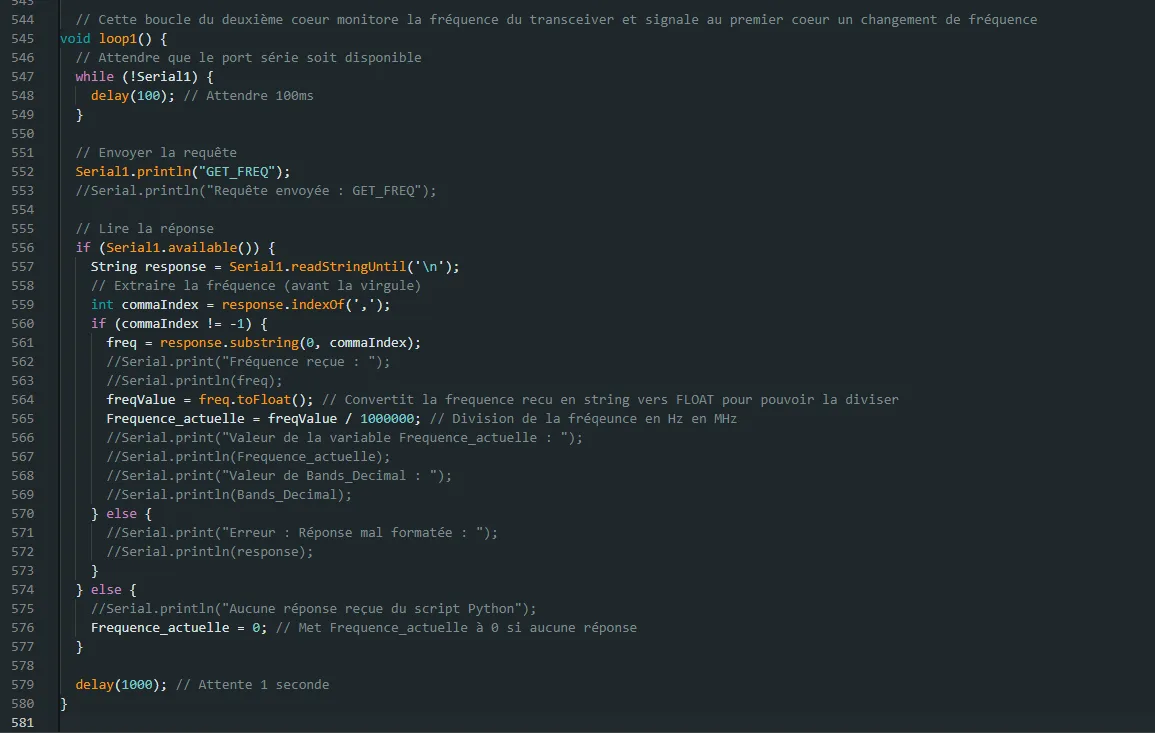
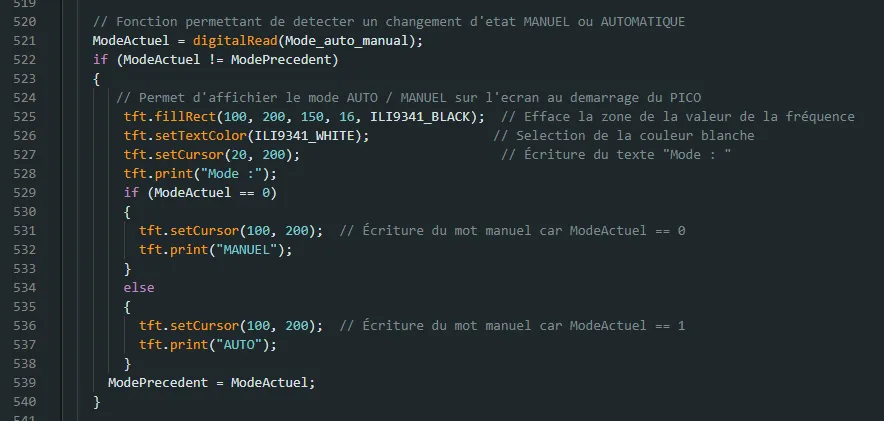
Un autre bout de code est la gestion AUTO / MANUAL fonction dans le cœur 1
L’intégralité de mon code est disponible ci dessous
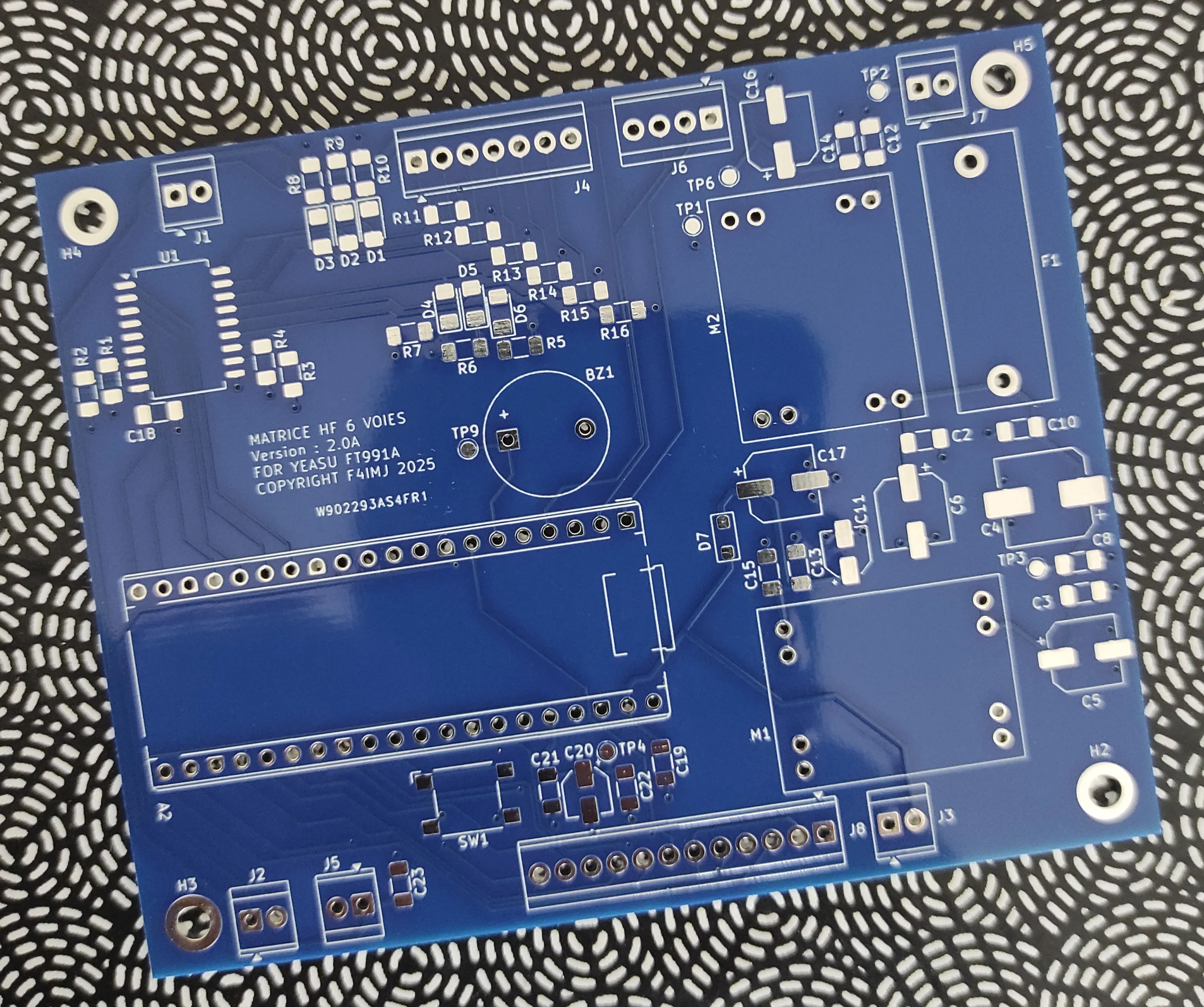
D) Routage et fabrication PCB
Le routage fut réalisé avec KICAD, la carte fait au final 100x80mm afin de rentrer dans le boîtier aluminium
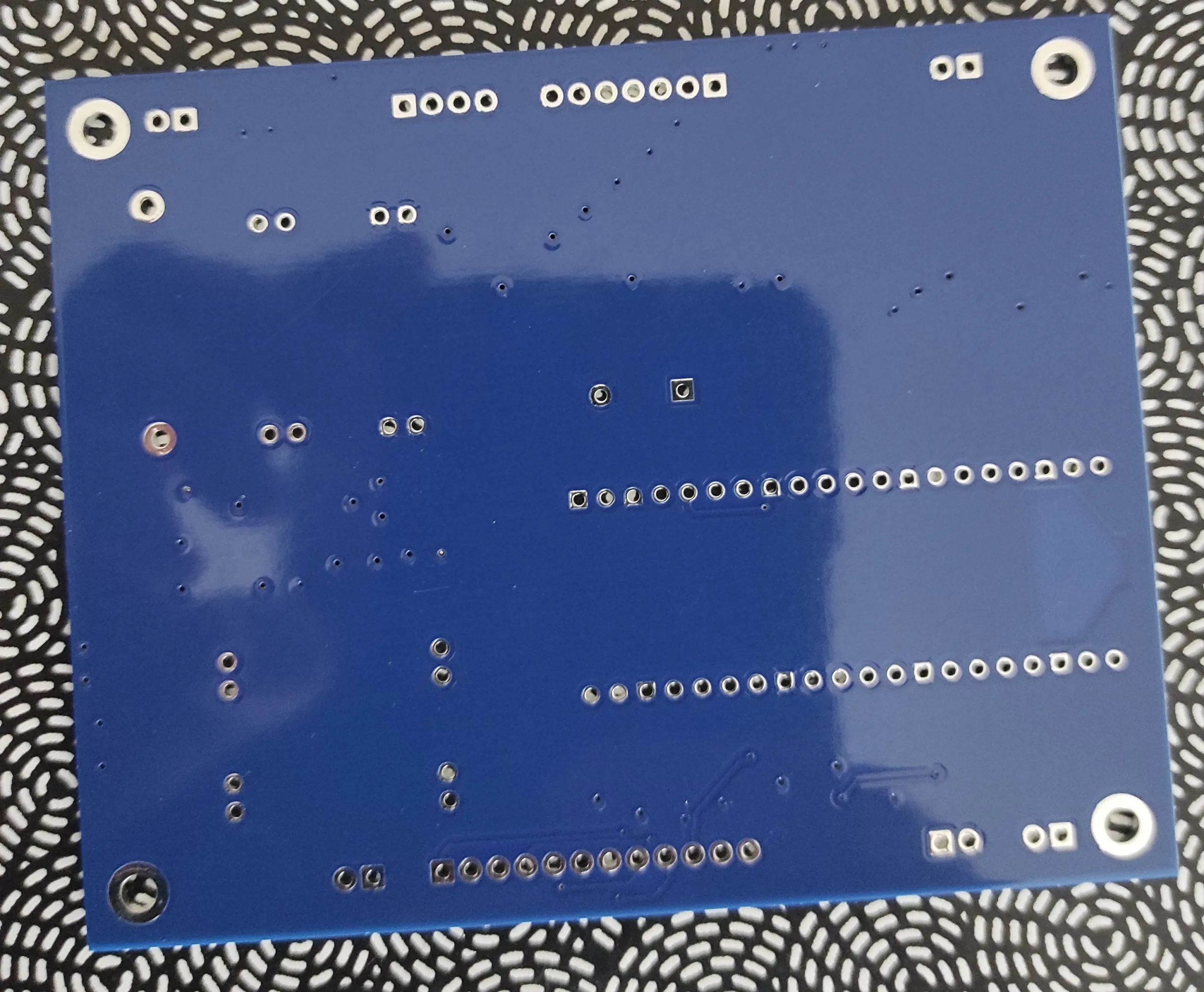
Un gros travail sur le passage des pistes a été réalisé surtout afin de ne pas couper le plan de masse présent au dos de la carte, seules quelques piste sont présentes dans le plan de masse.
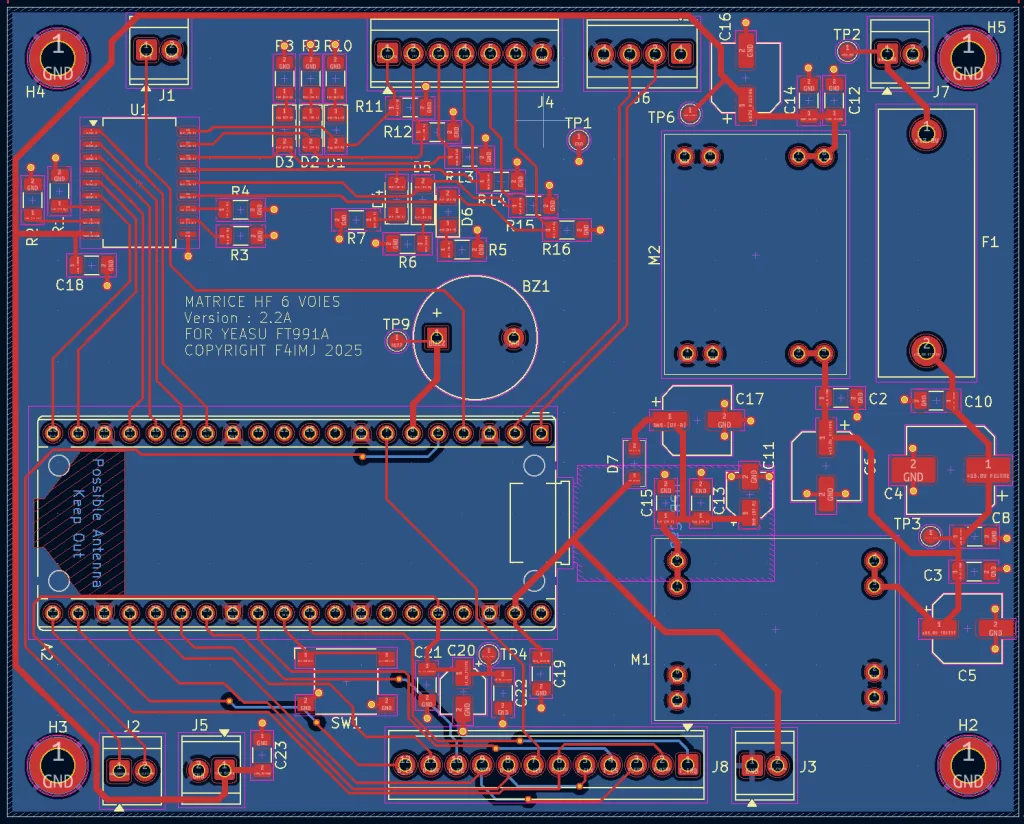
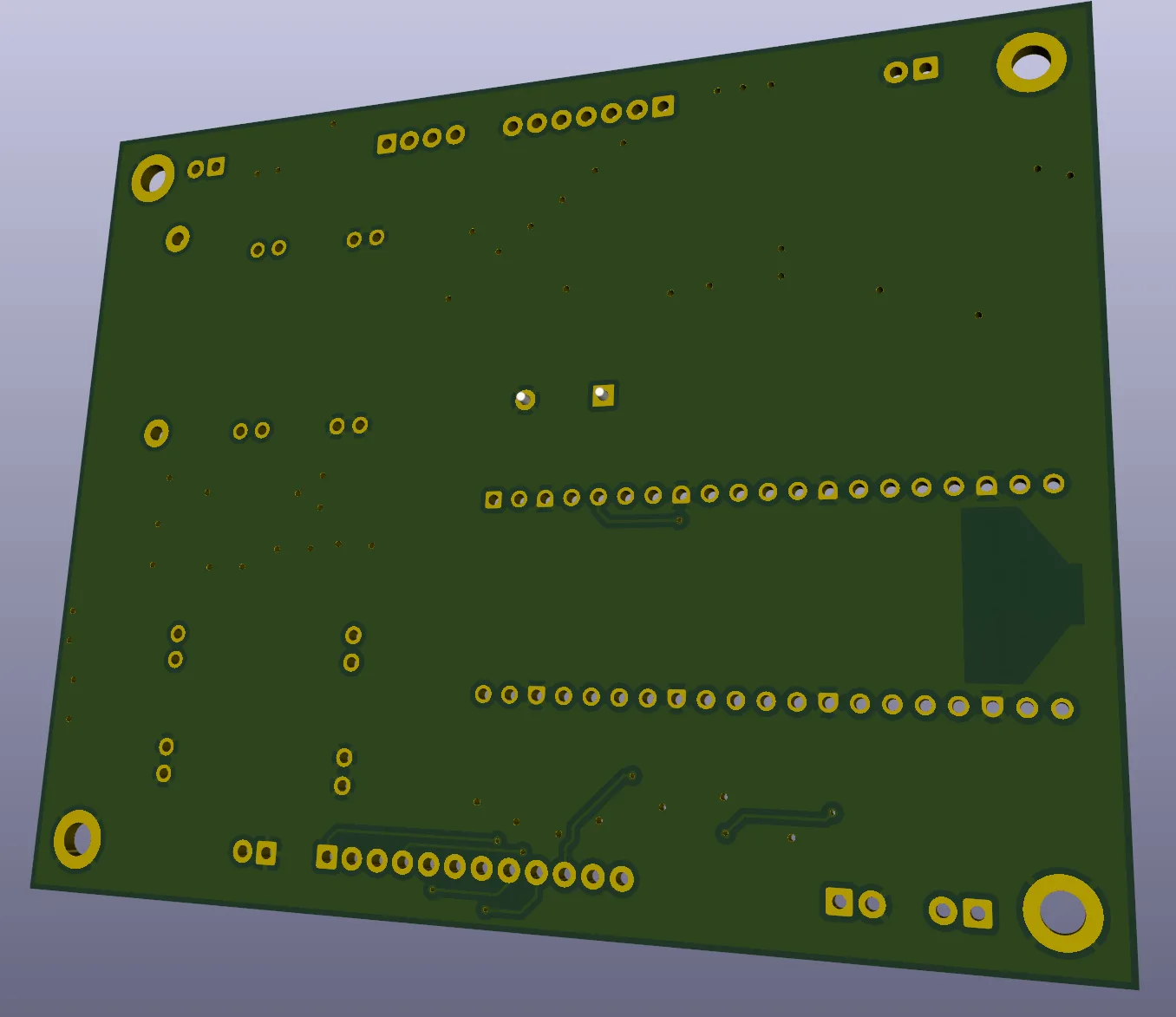
Ensuite la réalisation du PCB a été confié à PCBWay, un fabricant de PCB chinois on est sur un coût unitaire très bas mais celui-ci ne doit pas excéder 100x100m ici 100x80mm c’est parfait.
Il me reste 4 PCB de disponibles pour des personnes intéressés, me contacter si besoin.
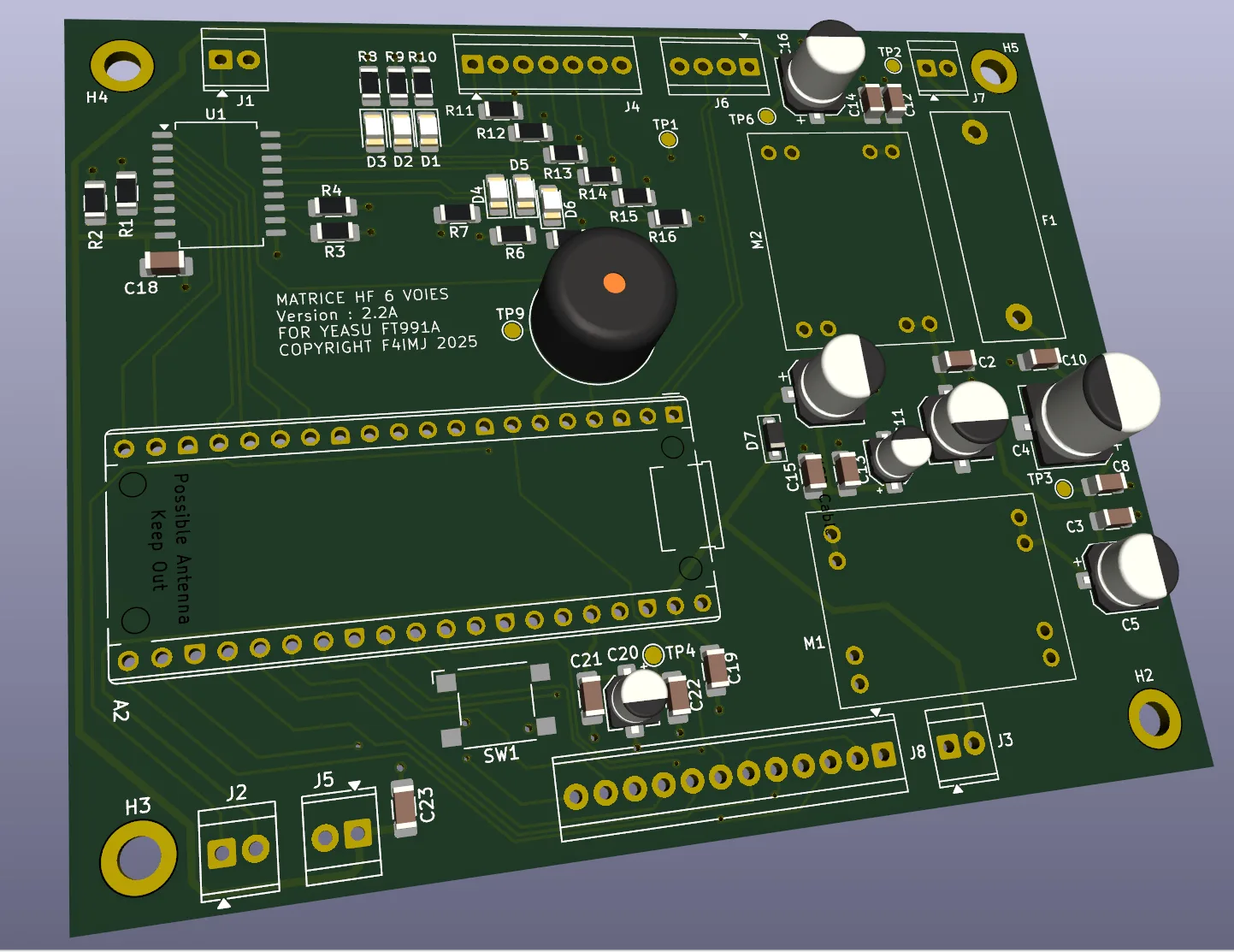
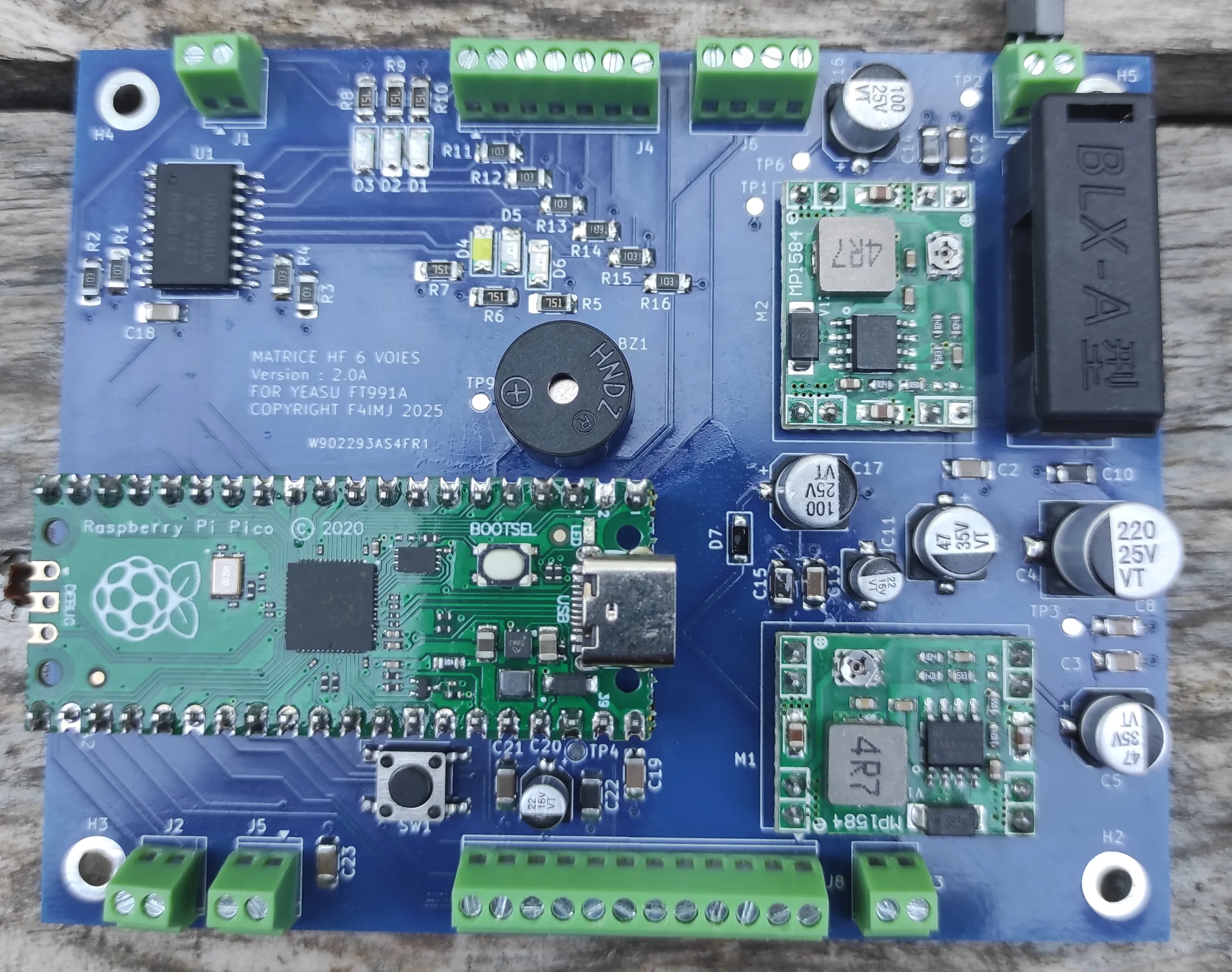
E) Montage de la carte
Les leds, résistances et la majorité des condensateurs céramiques sont au format 1206 ce qui va assez vite à souder.
On retrouve le Pi Pico, les deux bulk down converter (M1& M2)et le convertisseur de niveaux logiques (U1).
Au niveau des connecteurs
J1 : Connecteur vers connecteur arrière du boîtier pour le PTT + GND
J2 : Interrupteur en façade pour la sélection du mode MANUEL/AUTO
J3 : Alimentation du LCD
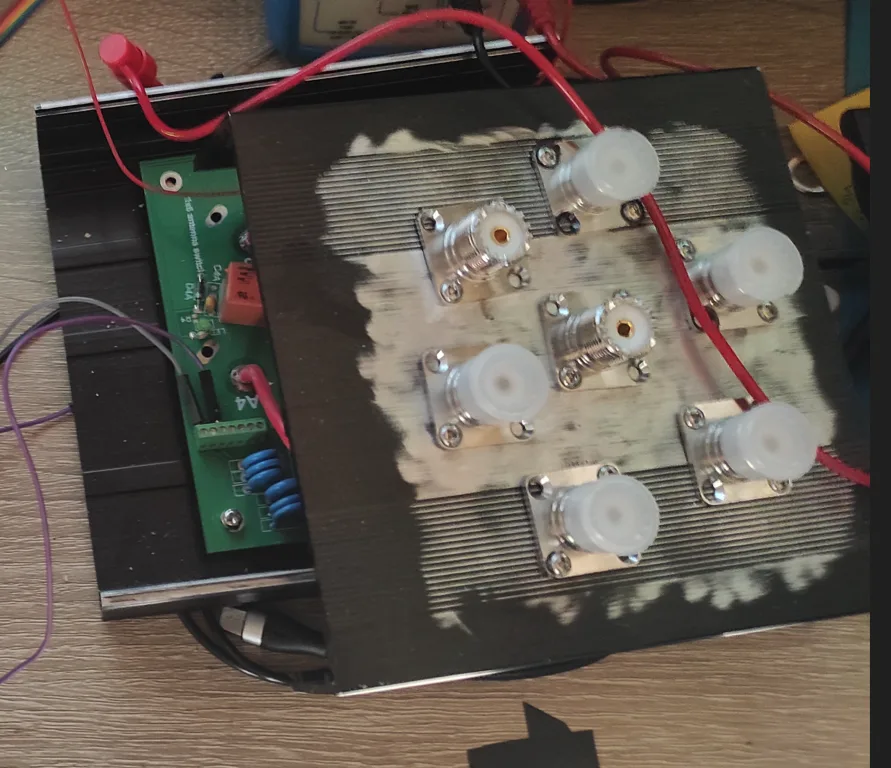
J4 : Connecteur vers connecteur arrière du boîtier vers MATRICE
J5 : Connecteur Led façade alimentation
J6 : Connecteur vers connecteur arrière du boîtier de la liaison série
J7 : Connecteur vers connecteur arrière du boîtier de l’alimentation 13.8V
J8 : Connecteur pour la connectique du LCD
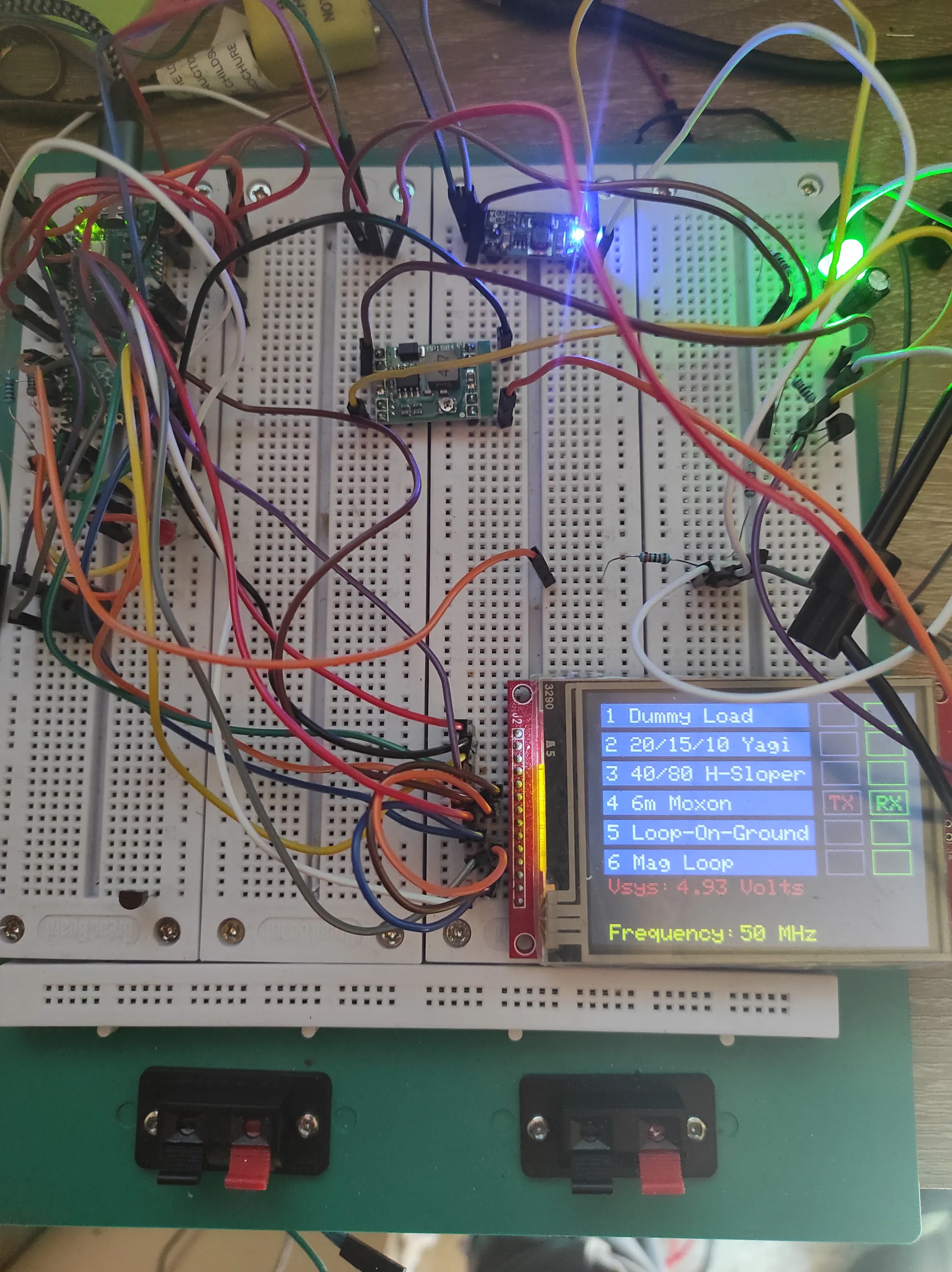
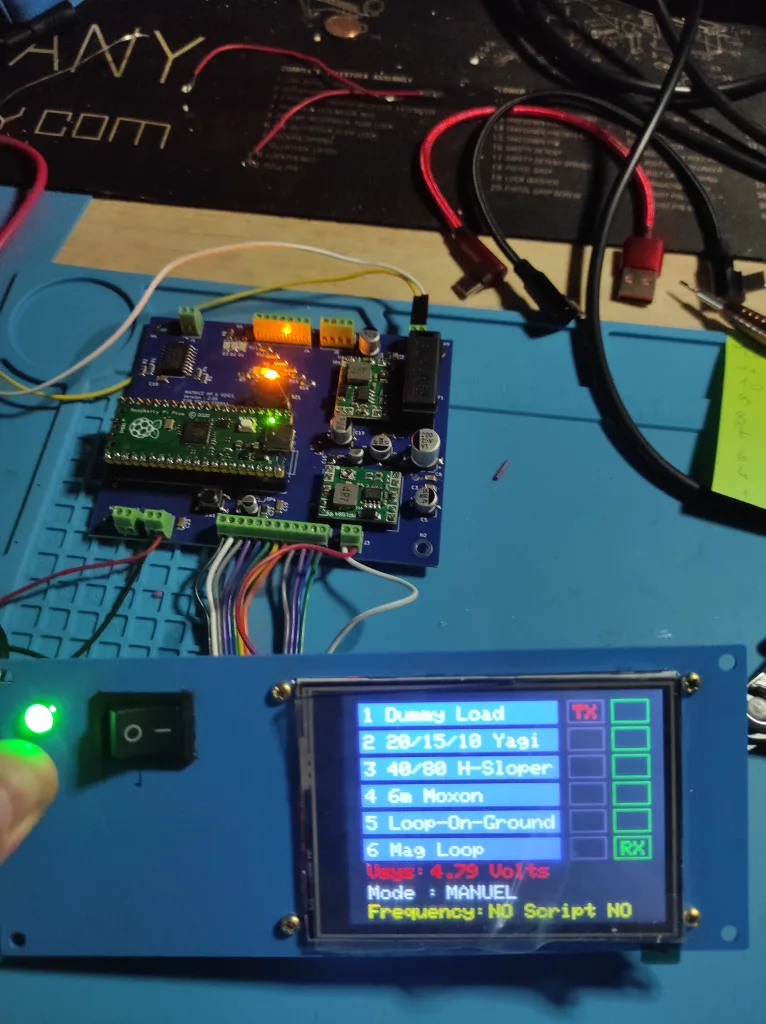
F) Essai de la carte
Les essais sont concluants, le tactile fonctionne, on vérifie les bugs etc…. On reprogramme le PICO avec les bons noms d’antennes et on affecte les bandes pour les antennes pour le mode AUTO.
La consommation totale du système est de 1.5W
G) Montage de la carte dans le boitier et tests finaux
Pour le montage on place la carte dans le boîtier avec des entretoises en nylon, oui j’ai fait le choix de ne pas relier le GND de ma carte à la terre.
✅ Voici pourquoi :
Isolation galvanique entre le PCB et le châssis métallique : utile pour les circuits sensibles ou les alimentations flottantes.
Moins de risques de boucles de masse (ground loops), qui peuvent générer des bruits parasites.
Pas de risque de courts-circuits si le boîtier touche accidentellement un autre signal du PCB.
Étant donné que mon GND provient de mon alimentation de laboratoire avec un gros filtre EMI celui-ci est propre je ne veux pas le coupler à la terre de chez moi.



Cela donne ce type de rendu
on voit les requêtes envoyées toutes les secondes sur 1 minutes glissant
et il y a la possibilité de choisir son port COM en haut pour trouver celui de la télécommande de la matrice.


Si le script n’est pas lancé ou OMNI-RIG ne répond pas il y aura affiché NO SCRIP NO ce qui veut dire que le mode AUTO ne peut fonctionner.
Si le script est OK et OMNI-RIG OK alors vous aurez votre fréquence en temps réel sur la télécommande de la matrice.
Présentation finale
![]()
Laisser un commentaire